
Spisu treści:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 11:30.
- Ostatnio zmodyfikowany 2025-01-23 15:03.

Jakiś czas temu zamieściłem mój kontroler Wifi PPM. Działa całkiem nieźle. Po prostu zasięg jest trochę krótki. Znalazłem rozwiązanie tego problemu. ESP8266 obsługuje tryb zwany ESPNOW. Ten tryb jest znacznie niższy. Nie traci połączenia tak łatwo, a jeśli straci połączenie, jest natychmiast ponownie podłączany.
Używam trzech ESP8266. Jeden to odbiornik ESPNOW, drugi to nadawca ESPNOW, a trzeci to punkt dostępowy, z którym można się połączyć. Trzecia jest potrzebna, ponieważ nadawca ESPNOW nie może być jednocześnie punktem dostępowym. Dodałem też kilka anten, aby uzyskać lepszy zasięg.
Bezpośrednio przy odbiorniku znajduje się drugi punkt dostępu. Jeśli połączysz się z tym, masz to samo, co ze starym projektem WifiPPM.
Dodałem również obsługę odbiornika protokołu MSP. Jest to „Protokół szeregowy MultiWii”, który jest obsługiwany przez MultiWii, Betaflight, Cleanflight i wiele innych kontrolerów lotu.
Krok 1: Lista części




Potrzebujesz trzech modułów ESP8266 dowolnego rodzaju. Ale chcesz mieć najlepszy zasięg. Proponuję więc zastosować moduły ESP8266 z antenami. Działa również bez anten. Używam następujących części:
2 x ESP07 (moduł ESP8266 ze złączem antenowym)
1 x ESP12
1 x 3dBi Mini Antena I-PEX U. FL IPX po stronie odbiornika
1 x ESP8266 2, 4/5 GHz 3dbi Wlan Wifi Antena SMA Stecker / męski + adapter I-PEX po stronie nadawcy
Zasilanie 3, 3 V dla wszystkich modułów ESP8266
Potrzebny jest również komputer z Arduino IDE: https://www.arduino.cc/en/Main/SoftwareESP8266 wsparcie dla Arduino IDE. Postępuj zgodnie z tymi instrukcjami: https://learn.sparkfun.com/tutorials/esp8266-thin… Biblioteka Websocket dla Arduino:
Krok 2: Pobierz i sflashuj szkice



Szkice można pobrać tutaj.
Rozpakuj plik. Istnieją trzy foldery: Master-AP, Sender, Receiver
Master-AP: To jest szkic punktu dostępowego. Otwórz szkic za pomocą arduino IDE. Ustaw częstotliwość procesora na 160 MHz w menu narzędzi i wgraj szkic do ESP12.
Nadawca: To szkic dla nadawcy MSPNOW. Ustaw częstotliwość procesora na 160 MHz i prześlij ją do jednego z ESP07.
Na pierwszym zdjęciu widać jak podłączyć moduł ESP8266 do flashowania.
Teraz podłącz porty szeregowe ESP12 (punkt dostępowy) i Sender ESP07 oraz podłączenia zasilania (drugi obrazek):ESP12 VCC -> ESP07 VCCESP12 GND -> ESP07 GNDESP12 TX -> ESP07 RXESP12 RX -> ESP07 TX
Uruchom oba moduły i połącz się z punktem dostępowym "Long-Range-WifiPPM/MSP". Hasło to „WifiPPM/MSP”
Otwórz przeglądarkę i otwórz adres IP 192.168.4.1. Pojawi się strona kontrolna. Kliknij przycisk „Informacje o Wi-Fi”. Pojawi się okno komunikatu z adresem MAC nadawcy i MAC odbiorcy.
Otwórz szkic odbiornika w Arduino IDE. Zmień wiersz "uint8_t sendermac = {0x5C, 0xCF, 0x7F, 0x77, 0xAB, 0xA6};" (trzecie zdjęcie) na adres Mac nadawcy, który jest wyświetlany na stronie. Odbiornik Mac powinien być w porządku. Upewnij się, że częstotliwość procesora jest ustawiona na 160 MHz i prześlij szkic do drugiego ESP05.
Krok 3: Podłącz odbiornik do kontrolera lotu i skonfiguruj Cleanflight



Podłącz teraz odbiornik do kontrolera lotu. Twój kontroler lotu powinien mieć wyjście 3,3 V z co najmniej 200 mA. Jeśli nie potrzebujesz dodatkowego regulatora napięcia 3,3V.
Podłącz GND ESP do GND kontrolera lotu. Podłącz VCC ESP do 3, 3 V kontrolera lotu lub do dodatkowego 3, 3 V regulatora napięcia.
Możesz użyć wyjścia PPM lub wyjścia szeregowego MSP.
Aby uzyskać wyjście MSP, podłącz TX ESP8266 do RX dowolnego portu szeregowego kontrolera lotu. (Obrazek 1)
Dla wyjścia PPM podłącz GPIO5 ESP8266 do wejścia PPM kontrolera lotu. (Obrazek 1)
Po podłączeniu ESP uruchom kontroler lotu i otwórz czysty lot. Połącz się telefonem komórkowym z punktem dostępu „WifiPPM/MSP”. Hasło to „WifiPPM/MSP”
Dla MSP: Otwórz zakładkę portów i ustaw MSP na porcie szeregowym, do którego podłączono ESP8266 (Zdjęcie 2). Zapisz i uruchom ponownie. Przejdź do zakładki konfiguracji i ustaw odbiornik na „Odbiornik szeregowy MSP” (Zdjęcie 3). Zapisz i uruchom ponownie.
Dla PPM: Przeczytaj w instrukcji kontrolera lotu, jak ustawić PPMGo w zakładce konfiguracji i ustaw odbiornik na "Odbiornik PPM" (Zdjęcie 4). Zapisz i uruchom ponownie.
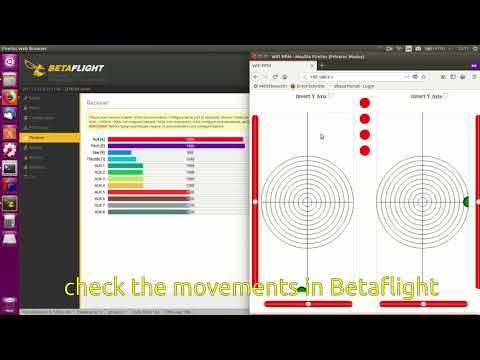
Następna konfiguracja jest taka sama dla obu odbiorników: Przejdź do zakładki odbiornika. Ustaw kanały na „RTAE1234” (Zdjęcie 5/Wideo). Zapisz konfigurację.
Teraz otwórz przeglądarkę na swoim smartfonie. Otwórz witrynę 192.168.4.1 (Zdjęcie 6). Teraz możesz sprawdzić kontroler.
Jeśli działa, uruchom dwa nadajniki ESP8266. Połącz się z punktem dostępu „Long Range WifiPPM/MSP”. Hasło to „WifiPPM/MSP”. Otwórz ponownie stronę 192.168.4.1. Sprawdź ponownie w czystym locie, czy działa.
Podłącz anteny do modułów ESP07.
Krok 4: Więcej informacji

Podczas normalnej pracy istnieją dwa punkty dostępu. Punkt dostępu „WifiPPM/MSP” jest podobny do poprzedniego projektu WifiPPM. Możesz go użyć, jeśli chcesz po prostu wykonać szybki lot bez podłączania dodatkowych modułów, gdy nie potrzebujesz połączenia dalekiego zasięgu. Jeśli połączysz się z "Long Range WifiPPM/MSP", kontroler dalekiego zasięgu przejmuje kontrolę.
Może chcesz wiedzieć, jak długi jest „daleki zasięg”. Właściwie to nie wiem. To co najmniej kilkaset metrów. Ale do tej pory nie mogłem tego przetestować. W moim mieszkaniu nie traci połączenia.
Dodałem kontrolę MSP, ponieważ pomyślałem, że mogę utworzyć kanał zwrotny dla danych telemetrycznych. Ale to nigdy nie działało stabilnie. W każdym razie protokół MSP jest dokładniejszy niż ppm, ponieważ nie zależy tak bardzo od timingu. Może to sprawia problemy z wolnymi kontrolerami lotu, ponieważ jest duży ruch na porcie szeregowym. Z moim kontrolerem lotu Noxe F4 działa bezproblemowo.
Jeśli masz jakiekolwiek problemy z konfiguracją, spójrz na stary projekt WifiPPM.
Zalecana:
Stacja pogodowa dalekiego zasięgu HC-12 i czujniki DHT: 9 kroków

Stacja pogodowa dalekiego zasięgu HC-12 i czujniki DHT: W tym samouczku dowiemy się, jak wykonać zdalną stację pogodową na duże odległości za pomocą dwóch czujników dht, modułów HC12 i wyświetlacza LCD I2C. Obejrzyj wideo
Pierwsze kroki z bezprzewodowymi czujnikami temperatury i wibracji dalekiego zasięgu: 7 kroków

Pierwsze kroki z bezprzewodowymi czujnikami temperatury i wibracji dalekiego zasięgu: Czasami wibracje są przyczyną poważnych problemów w wielu zastosowaniach. Od wałów maszyn i łożysk po wydajność dysków twardych, wibracje powodują uszkodzenie maszyny, wczesną wymianę, niską wydajność i poważnie wpływają na dokładność. Monitorowanie
Esp32-Ubidots-Wireless-dalekiego zasięgu Temperatura i wilgotność: 6 kroków

Esp32-Ubidots-Wireless-long-range Temperature-And-Humidity: W tym samouczku zmierzymy różne dane temperatury i wilgotności za pomocą czujnika temperatury i wilgotności. Dowiesz się również, jak przesłać te dane do Ubidots. Abyś mógł go analizować z dowolnego miejsca dla różnych zastosowań
Wysyłanie danych z bezprzewodowego czujnika temperatury i wilgotności dalekiego zasięgu IoT do arkusza Google: 39 kroków

Wysyłanie danych z bezprzewodowego czujnika temperatury i wilgotności dalekiego zasięgu IoT do arkusza Google: używamy tutaj czujnika temperatury i wilgotności NCD, ale kroki pozostają takie same dla każdego produktu ncd, więc jeśli masz inne bezprzewodowe czujniki ncd, możesz swobodnie obserwować obok. Za pomocą stopu tego tekstu musisz
Skaner WiFi dalekiego zasięgu przy użyciu ESP8266: 6 kroków (ze zdjęciami)
")
Skaner Wi-Fi dalekiego zasięgu za pomocą ESP8266: W tej instrukcji tworzę przenośne, 2,5-pasmowe urządzenie skanujące Wi-Fi, zasilane bateryjnie, używane do określenia, który kanał jest najlepszy dla mojej sieci domowej. Może być również używany do wyszukiwania otwartych punktów dostępu Wi-Fi w podróży. Koszt wykonania: około 25 dolarów za dolar