")
Spisu treści:
- Krok 1: Problem teoretyczny
- Krok 2: Wykorzystanie prawa Snella do demonstracji
- Krok 3: Praktyczny model eksperymentu
- Krok 4: Potrzebne materiały
- Krok 5: Drukowanie 3D
- Krok 6: Laserowe cięcie ścieżek
- Krok 7: Cięcie drewna
- Krok 8: Wiercenie otworów
- Krok 9: Osadzanie radiatorów i magnesów
- Krok 10: Podłączanie wyłączników krańcowych
- Krok 11: Wyświetlacz LCD
- Krok 12: Okablowanie elektroniki
- Krok 13: Przesyłanie kodu
- Krok 14: Przewodniki po drukowaniu 3D
- Krok 15: Dodawanie korka i jednostki rozrządu
- Krok 16: Mechanizm zwalniający
- Krok 17: Eksperyment
- Krok 18: Wniosek
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 11:29.
- Ostatnio zmodyfikowany 2025-01-23 15:03.




Krzywa brachistochrony jest klasycznym problemem fizyki, który wyznacza najszybszą ścieżkę pomiędzy dwoma punktami A i B, które znajdują się na różnych wysokościach. Chociaż ten problem może wydawać się prosty, oferuje sprzeczny z intuicją wynik i dlatego jest fascynujący do oglądania. W tych instrukcjach poznasz problem teoretyczny, opracujesz rozwiązanie i wreszcie zbudujesz model, który demonstruje właściwości tej niesamowitej zasady fizyki.
Ten projekt jest przeznaczony dla uczniów szkół średnich, ponieważ obejmują one powiązane koncepcje na zajęciach teoretycznych. Ten praktyczny projekt nie tylko wzmacnia ich zrozumienie tematu, ale także oferuje syntezę kilku innych dziedzin do opracowania. Na przykład podczas budowania modelu studenci będą uczyć się optyki poprzez prawo Snella, programowanie komputerowe, modelowanie 3d, frabricację cyfrową i podstawowe umiejętności obróbki drewna. Dzięki temu cała klasa może wnieść swój wkład dzieląc pracę między siebie, czyniąc to wysiłkiem zespołowym. Czas potrzebny na wykonanie tego projektu wynosi około tygodnia i można go następnie zademonstrować klasie lub młodszym uczniom.
Nie ma lepszego sposobu na naukę niż STEM, więc stwórz swój własny działający model brachistochrony. Jeśli podoba Ci się projekt, zagłosuj na niego w konkursie klasowym.
Krok 1: Problem teoretyczny


Problem brachistochrony polega na znalezieniu krzywej łączącej dwa punkty A i B znajdujące się na różnych wysokościach, tak że punkt B nie znajduje się bezpośrednio pod punktem A, tak że upuszczenie kulki pod wpływem jednolitego pola grawitacyjnego wzdłuż tej ścieżki spowoduje dotrzeć do punktu B w możliwie najkrótszym czasie. Problem postawił Johann Bernoulli w 1696 roku.
Gdy Johann Bernoulli zadał problem brachistochrony w czerwcu 1696 czytelnikom Acta Eruditorum, które było jednym z pierwszych czasopism naukowych niemieckojęzycznych krajów Europy, otrzymał odpowiedzi od 5 matematyków: Isaaca Newtona, Jakoba Bernoulliego, Gottfried Leibniz, Ehrenfried Walther von Tschirnhaus i Guillaume de l'Hôpital, każdy z nich ma unikalne podejście!
Uwaga: poniższe kroki zawierają odpowiedź i ujawniają piękno tej najszybszej ścieżki. Poświęć chwilę na zastanowienie się nad tym problemem, może rozwiążesz go tak, jak jeden z tych pięciu geniuszy.
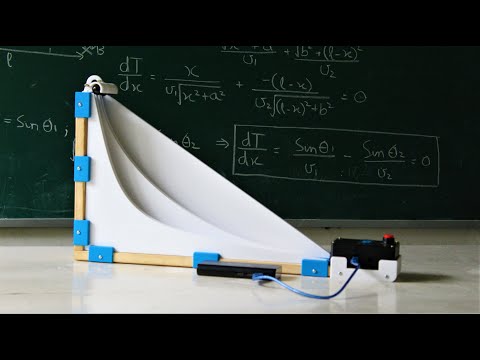
Krok 2: Wykorzystanie prawa Snella do demonstracji

Jednym z podejść do rozwiązania problemu brachistochrony jest zmierzenie się z nim poprzez narysowanie analogii z prawem Snella. Prawo Snella jest używane do opisania ścieżki, jaką przebyłaby wiązka światła, aby przejść z jednego punktu do drugiego, przechodząc przez dwa różne media, zgodnie z zasadą Fermata, która mówi, że wiązka światła zawsze wybiera najszybszą drogę. Formalne wyprowadzenie tego równania można znaleźć, odwiedzając poniższy link.
Ponieważ swobodnie spadający obiekt pod wpływem pola grawitacyjnego można porównać do wiązki światła przechodzącej przez zmieniające się media, za każdym razem, gdy wiązka światła napotyka nowe medium, wiązka ulega lekkiemu odchyleniu. Kąt tego odchylenia można obliczyć za pomocą prawa Snella. W miarę dodawania kolejnych warstw zmniejszających się gęstości przed odchyloną wiązką światła, aż wiązka osiągnie kąt krytyczny, w którym wiązka po prostu zostaje odbita, trajektoria wiązki opisuje krzywą brachistochrony. (czerwona krzywa na powyższym schemacie)
Krzywa brachistochrony jest w rzeczywistości cykloidą, która jest krzywą wyznaczoną przez punkt na obręczy koła kołowego, gdy koło toczy się po linii prostej bez poślizgu. Tak więc, jeśli potrzebujemy narysować krzywą, można po prostu użyć powyższej metody, aby ją wygenerować. Kolejną unikalną właściwością krzywej jest to, że kula wypuszczona z dowolnego punktu krzywej zajmie dokładnie tyle samo czasu, aby dotrzeć do dna. Poniższe kroki opisują proces tworzenia eksperymentu w klasie poprzez skonstruowanie modelu.
Krok 3: Praktyczny model eksperymentu

Model składa się z wyciętych laserowo ścieżek, które działają jak ścieżki dla kulek. Aby zademonstrować, że krzywa brachistochrony jest najszybszą ścieżką z punktu A do B, postanowiliśmy porównać ją z dwoma innymi ścieżkami. Ponieważ sporo osób intuicyjnie odczułoby, że najkrótszy odcinek jest najszybszy, zdecydowaliśmy się postawić prostą skarpę łączącą oba punkty jako drugą ścieżkę. Trzeci to stromy zakręt, ponieważ można by odczuć, że nagły spadek wygeneruje prędkość wystarczającą do pokonania reszty.
Drugi eksperyment, w którym kulki wyrzucane są z różnych wysokości na trzech ścieżkach brachistochrony, skutkuje tym, że kulki docierają w tym samym czasie. Dlatego nasz model posiada wydrukowane w 3D prowadnice, które zapewniają łatwą wymienność pomiędzy panelami akrylowymi, umożliwiając przeprowadzenie obu eksperymentów.
Wreszcie mechanizm zwalniający zapewnia, że kulki są upuszczane razem, a moduł czasowy na dole rejestruje czasy, gdy kulki docierają do dna. Aby to osiągnąć, wbudowaliśmy trzy wyłączniki krańcowe, które są aktywowane, gdy kulki je wyzwalają.
Uwaga: można po prostu skopiować ten projekt i zrobić go z tektury lub innych łatwo dostępnych materiałów
Krok 4: Potrzebne materiały



Oto części i materiały potrzebne do wykonania działającego modelu eksperymentu brachistochronowego
SPRZĘT:
1" Deska z drewna sosnowego - wymiary; 100cm na 10cm
Neodymowy Magnetx 4 - wymiary; 1 cm średnicy i 0,5 cm wysokości
Filament do druku 3D - PLA lub ABS są w porządku
Wkładka gwintowana M3 x 8 - (opcjonalnie)
Śruba M3 x 8 - 2,5 cm długości
Wkręt do drewna x 3 - 6 cm długości
Wkręt do drewna 12 - długość 2,5 cm
ELEKTRONIKA:
Arduino Uno
Wyłącznik krańcowyx 4- te przełączniki będą działać jako układ rozrządu
Naciśnij przycisk
Wyświetlacz LCD
Jumpwire x wiele
Całkowity koszt modelu wyniósł około 3 0$
Krok 5: Drukowanie 3D


Kilka części, takich jak mechanizm zwalniający i skrzynka kontrolna, wykonano za pomocą drukarki 3d. Poniższa lista zawiera całkowitą liczbę części i ich specyfikacje drukowania. Wszystkie pliki STL znajdują się w załączonym powyżej folderze, co pozwala w razie potrzeby na dokonanie niezbędnych modyfikacji.
Skrzynka kontrolna x 1, 20% wypełnienia
Prowadnica x 6, 30% wypełnienia
Ogranicznik końcowy x 1, wypełnienie 20%
Ramię obrotowe x 1, wypełnienie 20%
Mocowanie obrotowe x 1, wypełnienie 30%
Element zwalniający x 1, 20% wypełnienia
Części zostały wydrukowane w PLA, ponieważ nie ma na nie szczególnego naprężenia. Łącznie zajęło to około 40 godzin drukowania.
Krok 6: Laserowe cięcie ścieżek

Różne ścieżki, które zaprojektowaliśmy w Fusion 360, zostały wyeksportowane jako pliki.dxf, a następnie wycięte laserowo. Do wykonania krzywych wybraliśmy nieprzezroczysty biały akryl o grubości 3 mm. Można nawet zrobić to z drewna za pomocą narzędzi ręcznych, ale ważne jest, aby wybrany materiał był sztywny, ponieważ elastyczność może wpłynąć na to, jak kulki toczą się.
6 x krzywa brachistochrony
2 x krzywa stroma
2 x prosta krzywa
Krok 7: Cięcie drewna


Stelaż modelu wykonany jest z drewna. Wybraliśmy sosnę 1" na 4", ponieważ pozostało nam trochę z poprzedniego projektu, chociaż można użyć wybranego przez nich drewna. Za pomocą piły tarczowej i prowadnicy tniemy dwa kawałki drewna o długości:
48 cm, czyli długość ścieżki;
31cm czyli wysokość
Wyczyściliśmy nierówne krawędzie, delikatnie szlifując je na szlifierce tarczowej.
Krok 8: Wiercenie otworów



Przed skręceniem ze sobą dwóch kawałków zaznacz grubość drewna na jednym końcu dolnego kawałka i wyśrodkuj trzy równoodległe otwory. Użyliśmy wiertła 5 mm, aby wykonać otwór pilotażowy na obu kawałkach drewna i pogłębiliśmy otwór w dolnym elemencie, aby umożliwić wbicie łba śruby.
Uwaga: Uważaj, aby nie rozłupać pionowego kawałka drewna, ponieważ będzie się wiercić w słojach końcowych. Używaj również długich wkrętów do drewna, ponieważ ważne jest, aby rama nie drżała, a górna część ze względu na dźwignię.
Krok 9: Osadzanie radiatorów i magnesów



Ponieważ nici w częściach drukowanych w 3D mają tendencję do zużywania się z czasem, zdecydowaliśmy się na osadzenie radiatorów. Otwory są nieco za małe, aby radiator mógł lepiej przylegać do plastiku. Umieściliśmy radiatory M3 nad otworami i wepchnęliśmy je końcówką lutownicy. Ciepło topi plastik, pozwalając zębom się zaklinować. Upewnij się, że są zlicowane z powierzchnią i weszły prostopadle. W sumie jest 8 miejsc na wkładki gwintowane: 4 na pokrywę i 4 do montażu Arduino Uno.
Aby ułatwić montaż jednostki czasowej, w pudełku umieściliśmy magnesy, co ułatwia odłączenie w razie konieczności zmiany. Magnesy muszą być zorientowane w tym samym kierunku, zanim zostaną wepchnięte na miejsce.s
Krok 10: Podłączanie wyłączników krańcowych



Trzy wyłączniki krańcowe są przymocowane z jednej strony jednostki czasowej, która jest skierowana w dół ścieżek. W ten sposób, gdy kule klikną przełączniki, można określić, która piłka dotarła jako pierwsza i wyświetlić czas na wyświetlaczu LCD. Przylutuj małe paski drutu do zacisków i zabezpiecz je w gniazdach odrobiną kleju CA, ponieważ nie powinny się poluzować po ciągłych uderzeniach.
Krok 11: Wyświetlacz LCD




W pokrywie jednostki pomiaru czasu znajduje się prostokątne wycięcie na ekran LCD oraz otwór na przycisk „start”. Wyświetlacz zabezpieczyliśmy odrobiną gorącego kleju, aż zrównał się z powierzchnią pokrywy i przymocowaliśmy czerwony przycisk nakrętką mocującą.
Krok 12: Okablowanie elektroniki



Okablowanie polega na podłączeniu różnych komponentów do odpowiednich pinów Arduino. Postępuj zgodnie ze schematem połączeń załączonym powyżej, aby skonfigurować skrzynkę.
Krok 13: Przesyłanie kodu




Kod Arduino dla projektu brachistochrone można znaleźć poniżej. W komorze elektroniki znajdują się dwa otwory zapewniające łatwy dostęp do portu programowania Arduino i gniazda zasilania.
Czerwony przycisk, który znajduje się na górze pudełka, służy do uruchamiania stopera. Gdy kulki przetoczą się po krzywych i uruchomią wyłączniki krańcowe, które znajdują się na dole, czasy są kolejno rejestrowane. Po uderzeniu wszystkich trzech kul, na ekranie LCD wyświetlane są wyniki, wyrównane z odpowiednimi krzywymi (zdjęcia załączone powyżej). Po zanotowaniu wyników w przypadku, gdy wymagany jest drugi odczyt, wystarczy ponownie nacisnąć główny przycisk, aby odświeżyć licznik i powtórzyć ten sam proces.
Krok 14: Przewodniki po drukowaniu 3D




Prowadnice, które zostały wydrukowane w 3D, miały podstawę z materiału 3 mm przed rozpoczęciem ścian nośnych. Dlatego też, gdy panele akrylowe zostałyby wsunięte na miejsce, powstałaby przerwa między panelem a drewnianą ramą, zmniejszając stabilność ścieżki.
Dlatego prowadnica musiała być osadzona na 3 mm w drewnie. Ponieważ nie mieliśmy routera, zabraliśmy go do lokalnego warsztatu i wykonaliśmy na frezarce. Po odrobinie szlifowania wydruki pasowały do siebie i można było je zabezpieczyć śrubami do drewna z boku. Powyżej dołączony jest szablon do umieszczenia 6 prowadnic na drewnianej ramie.
Krok 15: Dodawanie korka i jednostki rozrządu




Ponieważ moduł rozrządu był oddzielnym systemem, postanowiliśmy wykonać system szybkiego montażu i demontażu za pomocą magnesów. W ten sposób można go łatwo zaprogramować, po prostu wyjmując jednostkę. Zamiast robić szablon do przenoszenia magnesów, które mają być osadzone w drewnie, po prostu pozwalamy im połączyć się z magnesami na pudełku, a następnie nakładamy trochę kleju i umieszczamy pudełko na kawałku drewna. Ślady kleju przeniosły się na drewno, co pozwoliło nam szybko wywiercić otwory w dokładnych miejscach. Na koniec przymocuj wydrukowany w 3D korek, a jednostka czasowa powinna być dobrze dopasowana, ale jednocześnie można ją odłączyć za pomocą lekkiego pociągnięcia
Krok 16: Mechanizm zwalniający



Mechanizm zwalniający jest prosty. Użyj nakrętki i śruby, aby ciasno połączyć sekcję C z ramieniem obrotowym, czyniąc je jednym bezpiecznym elementem. Następnie wywierć dwa otwory w środku pionowego drewna i przymocuj uchwyt. Wsuń obrotowy wałek i mechanizm jest kompletny.
Krok 17: Eksperyment


Teraz, gdy model jest gotowy, można przeprowadzić następujące eksperymenty
Eksperyment 1
Ostrożnie wsuń akrylowe panele prostej ścieżki, krzywej brachistochrony i stromej ścieżki (w tej kolejności dla najlepszego efektu). Następnie pociągnij zatrzask i umieść trzy kulki na górze krzywej, upewniając się, że są idealnie dopasowane do siebie. Trzymaj je mocno na miejscu z opuszczonym zatrzaskiem. Spraw, aby jeden uczeń wypuścił piłki, a drugi wcisnął czerwony przycisk, aby uruchomić system pomiaru czasu. Na koniec obserwuj kulki toczące się po ścieżce i analizuj wyniki wyświetlane na module pomiaru czasu. Ustawienie kamery do nagrywania materiału w zwolnionym tempie jest jeszcze bardziej ekscytujące, ponieważ można zobaczyć wyścig klatka po klatce.
Eksperyment 2
Podobnie jak w poprzednim eksperymencie, wsuń akrylowe panele, ale tym razem wszystkie ścieżki muszą być krzywą brachistonchrone. Ostrożnie poproś ucznia, aby tym razem trzymał trzy kule na różnych wysokościach i naciskał czerwony przycisk, gdy kule są wypuszczane. Obserwuj zadziwiający moment, gdy kule idealnie ustawiają się przed metą i potwierdź obserwacje wynikami.
Krok 18: Wniosek

Wykonanie modelu brachistochrony to praktyczny sposób, aby zobaczyć magiczne sposoby funkcjonowania nauki. Eksperymenty są nie tylko przyjemne do oglądania i wciągające, ale także oferują syntezę aspektów uczenia się. Choć przede wszystkim projekt przeznaczony dla uczniów szkół średnich, zarówno w praktyce, jak i teoretycznie, demonstracja ta może być łatwo uchwycona przez młodsze dzieci i może być pokazana jako uproszczona prezentacja.
Chcielibyśmy zachęcić ludzi do robienia rzeczy, czy to sukcesów, czy porażek, ponieważ pod koniec dnia STEM jest zawsze zabawny! Miłego robienia!
Oddaj głos w konkursie w klasie, jeśli podobały Ci się instrukcje i zostaw swoją opinię w sekcji komentarzy.


Nagroda główna w konkursie Classroom Science Contest
Zalecana:
Licznik kroków - Micro:Bit: 12 kroków (ze zdjęciami)
")
Licznik kroków - Micro:Bit: Ten projekt będzie licznikiem kroków. Do pomiaru kroków użyjemy czujnika przyspieszenia wbudowanego w Micro:Bit. Za każdym razem, gdy Micro:Bit się trzęsie, dodamy 2 do licznika i wyświetlimy go na ekranie
Krzywa I - V z Arduino: 5 kroków

I - V Curve Z Arduino: Postanowiłem stworzyć krzywą I–V diod led. Ale mam tylko jeden multimetr, więc stworzyłem prosty miernik I-V za pomocą Arduino Uno. Z Wiki: Charakterystyka prądowo-napięciowa lub krzywa I-V (krzywa prądowo-napięciowa) to zależność, zwykle reprezentowana jako cha
Bolt - DIY Wireless Charging Night Clock (6 kroków): 6 kroków (ze zdjęciami)
: 6 kroków (ze zdjęciami)")
Bolt - DIY Wireless Charging Night Clock (6 kroków): Ładowanie indukcyjne (znane również jako ładowanie bezprzewodowe lub ładowanie bezprzewodowe) to rodzaj bezprzewodowego przesyłania energii. Wykorzystuje indukcję elektromagnetyczną do dostarczania energii elektrycznej do urządzeń przenośnych. Najpopularniejszym zastosowaniem jest stacja ładowania bezprzewodowego Qi
Krzywa nauki białej diody LED!: 5 kroków

Krzywa uczenia białej diody LED!: Potrzebowałem jasnego światła Próbowałem coś naprawić i potrzebowałem lepszego światła, aby odróżnić jeden kawałek czarnego plastiku od drugiego w ograniczonej przestrzeni … i co lepsze niż super jasna zimna biała dioda LED (wyświetlanie światła Dioda)? Na szczęście Chri
Dyskretny naprzemienny analogowy fader LED z liniową krzywą jasności: 6 kroków (ze zdjęciami)
")
Dyskretny naprzemienny analogowy tłumik LED z liniową krzywą jasności: Większość obwodów do ściemniania/ściemniania diody LED to obwody cyfrowe wykorzystujące wyjście PWM mikrokontrolera. Jasność diody LED jest kontrolowana poprzez zmianę cyklu pracy sygnału PWM. Wkrótce odkrywasz, że przy liniowej zmianie cyklu pracy