
Spisu treści:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 11:27.
- Ostatnio zmodyfikowany 2025-01-23 15:02.


Ten obwód jest sterownikiem wahadłowym.
Silnik może obracać się zgodnie z ruchem wskazówek zegara i przeciwnie do ruchu wskazówek zegara w zależności od kierunku prądu.
Możesz zobaczyć obwód działający na filmie.
Kieszonkowe dzieci
Elementy składowe: cewki indukcyjne - 2 (clicker, duża cewka lub przekaźnik), rezystory (pokazane w obwodzie), źródło zasilania (dwie baterie 9 V z jednej baterii 12 V), diody dużej mocy - 2, karton lub płytka matrycowa, przewody, 1 drut metalowy mm, lutowane, izolowane przewody, tranzystory mocy NPN BJT - 2, radiatory - 2, tranzystory ogólnego przeznaczenia NPN i PNP - 5, obudowa (karton lub plastikowe pudełko).
Narzędzia: ściągacz izolacji, nożyczki, szczypce, lutownica.
Narzędzia opcjonalne: oscyloskop USB, multimetr.
Krok 1: Zaprojektuj obwód

Narysowałem obwód za pomocą starego oprogramowania symulacyjnego PSpice, aby skrócić czas rysowania obwodów.
Idealnie rozładowana cewka indukcyjna jest początkowo obwodem otwartym. Po kilku sekundach lub milisekundach cewka indukcyjna jest w pełni naładowana. (większe cewki ładują się dłużej) cewka indukcyjna staje się odpowiednikiem zwarcia. Czas ładowania można skrócić, zwiększając rezystancję „widzianą” przez cewkę indukcyjną lub zwiększając prąd ładowania:
Vl(t) = L*di(t)/dt
Wyjście tranzystorowe można modelować jako źródło prądowe, dostarczające stały prąd do cewki ładującej. Diody służą do rozładowania dwóch cewek indukcyjnych i ograniczenia maksymalnego napięcia na cewkach rozładowujących.
Tranzystory Q1a i Q2a tworzą obwód buforowy, a tranzystor Q1b jest falownikiem. Kliknij poniższy link, aby zobaczyć podobny obwód:
hackaday.io/page/6956-silly-robot
Krok 2: Symulacje



Użyłem oprogramowania PSpice, które pozwala na szybkie symulacje.
Możesz zobaczyć napięcia indukcyjne ładowania i rozładowania (pokazane na pierwszym wykresie).
Widać również, że maksymalny prąd silnika wynosi 20 mA (pokazano na drugim wykresie).
Krok 3: Wykonaj obwód

Zrobiłem tylko sterownik silnika. Nie zrobiłem bufora i falownika.
Zaimplementowałem obwód za pomocą dwóch starych sowieckich diod.
Użyłem dwóch rezystorów dużej mocy 10 omów, które przy połączeniu równoległym dają 5 omów.
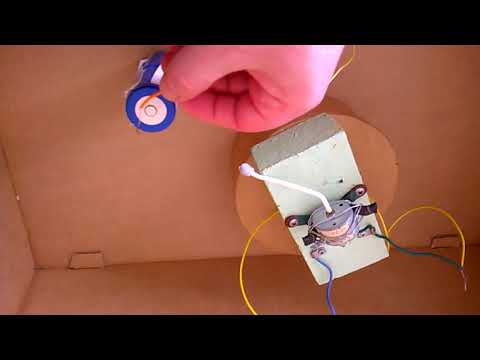
Cewki zostały zaimplementowane za pomocą dwóch pilotów ze starego urządzenia.
Krok 4: Umieść obwód w pudełku

Użyłem starego pudełka prezentowego jako obudowy.
Krok 5: Testowanie

Przetestowałem układ z dwoma bateriami 9 V i zasilaczem 15 V.
Zalecana:
Magic Hercules - sterownik do cyfrowych diod LED: 10 kroków

Magic Hercules - Driver for Digital LEDs: Szybki przegląd: Moduł Magic Hercules to konwerter między dobrze znanym i prostym SPI na protokół NZR. Wejścia modułu posiadają tolerancję +3,3 V, dzięki czemu można bezpiecznie podłączyć dowolne mikrokontrolery pracujące na napięciu +3,3 V.Zastosowanie
Sterownik zmiennej prędkości silnika: 8 kroków

Regulator prędkości silnika o zmiennej prędkości: W tym projekcie pokażę, w jaki sposób stworzyłem regulator prędkości silnika i amp; Pokażę również, jak łatwo można zbudować regulator zmiennej prędkości silnika za pomocą IC 555. Zaczynajmy
Jak zrobić statyczny sterownik LCD z interfejsem I²C: 12 kroków

Jak zrobić statyczny sterownik LCD z interfejsem I²C: Wyświetlacze ciekłokrystaliczne (LCD) są szeroko stosowane w zastosowaniach komercyjnych i przemysłowych ze względu na ich dobre właściwości wizualne, niski koszt i niskie zużycie energii. Te właściwości sprawiają, że LCD jest standardowym rozwiązaniem dla urządzeń zasilanych bateryjnie
Losowo reagujące wahadła: 4 kroki (ze zdjęciami)
")
Losowo reagujące wahadła: Celem tego projektu jest wywołanie ciągłego kołysania 2 wahadeł. Odkryłem przyjemną zależność między aktywnym i pasywnym wahadłem. Poruszają się w chmurze pól sił trwałych, elektromagnetycznych i grawitacyjnych. Waga p
Wahadła napędzane silnikiem: 4 kroki (ze zdjęciami)
")
Wahadła napędzane silnikiem: Tutaj zamierzam wykonać dwa wahadła lub wahadła, które są napędzane silnikami, które z kolei są sterowane przez MCU PIC32, i zaimplementować niektóre funkcje, tj. symulować ruch wahadeł pod wpływem grawitacji lub działania sprężyny, kontrolując