
Spisu treści:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 11:29.
- Ostatnio zmodyfikowany 2025-01-23 15:02.



To jest zmiana i inspiracja z
Zmieniam kod źródłowy, aby światło migotało tam iz powrotem i było wolniejsze.
Jest to ręcznie robiony model pasa startowego lotniska.
Krok 1: Narzędzia


Aby wykonać model pasa startowego Running LED, potrzebujesz:
1 Arduino (Leonardo)
1 deska do krojenia chleba
12x15mm diody LED
13 przewodów
24 przedłużacze
1 puste pudełko na buty
1 standardowe złącze USB typu A
1 rezystor 100 Ohm
Po posiadaniu tych narzędzi możesz ozdobić pudełko kolorowym papierem.
Krok 2: Zrób to



Najpierw musisz podłączyć diody LED do Arduino za pomocą przewodów. Każdą diodę należy podłączyć dwoma przewodami, jeden do Arduino, drugi do elektrody ujemnej. I włożenie rezystora do dławienia prądu przechodzi przez diodę LED.
Krok 3: Programowanie



Więc daj się programować! Po pierwsze, musisz zapisać wyjścia dla pinów, w tym kodzie źródłowym jest 12 pinów, od 2 do 13. Po drugie, musisz zapisać jeden wysoki zapis cyfrowy i jeden niski do każdej diody LED, każda dioda będzie miała opóźnienie 100ms. Po trzecie, musisz wykonać poprzednie kroki, aby zapisać go z diody LED nr 2 do diody LED nr 13 i zapisać z powrotem z diody nr 13 do nr 2. Jeśli nadal nie wiesz, jak go zaprogramować, możesz postępować zgodnie z instrukcjami, przeglądając zrzuty ekranu lub pobrać kod źródłowy, linki znajdują się poniżej.
Kod źródłowy:
Krok 4: Zmień przewody na przewody przedłużające




Po zakończeniu programowania możesz wgrać swój kod źródłowy na swoją płytkę Arduino i sprawdzić, czy światło może migać tam iz powrotem. Ponieważ zamierzamy umieścić płytkę Arduino w pudełku, więc musimy umieścić diody na przedłużaczach. Każda dioda LED będzie podłączona na dwóch przedłużaczach. Polecam wybrać przedłużacze tego samego koloru do połączeń z tą samą diodą LED, pomoże to szybciej i wydajniej uporządkować diody LED. Po zakończeniu wymiany przewodów możesz skleić dwa przedłużacze razem, aby wyglądało na zorganizowane.
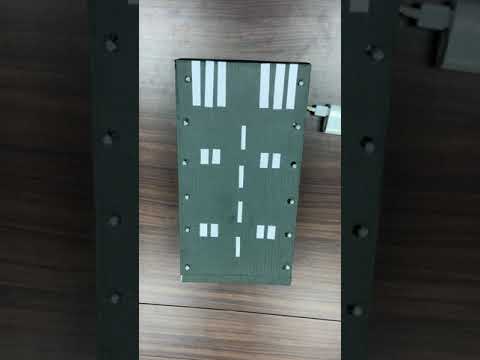
Krok 5: Wkładanie do pudełka



Najpierw musisz wywiercić 12 otworów (po 6 z każdej strony) na powierzchni pudełka, otwór powinien pasować do diody LED. Po przewierceniu można włożyć Arduino do pudełka. Następnie można włożyć diody do otworu w kolejności, do płytki stykowej jest podłączonych 12 diod, należy podzielić 2 diody na grupę i włożyć odwrotnie kierunek. Po zakończeniu montażu powinno być ustawionych 6 grup diod LED skierowanych do siebie.
Krok 6: Wywierć otwór na linię USB typu A



Wpuszczając diody LED, musimy je naładować. Możesz wywiercić otwór z boku pudełka, aby wypuścić kabel ładujący. Nawiasem mówiąc, Arduino pasuje do linii Type-A.
Krok 7: Zamknij pudełko i zakończ



Po wywierceniu otworu na kabel ładujący możesz podłączyć kabel ładujący do power banku. Wreszcie możesz zamknąć pudełko i skończyć!!!
Zalecana:
Wczesne ostrzeżenie Światło pasa startowego Raspberry PI przy użyciu danych mapowania lotu: 14 kroków (ze zdjęciami)
")
Wczesne ostrzeżenie Światło pasa startowego Raspberry PI wykorzystujące dane mapowania lotu: Ta lampa powstała z kilku powodów, ponieważ zawsze interesują mnie samoloty, które latają nad głową, a latem w weekendy często latają całkiem ekscytujące. Chociaż słyszysz je tylko wtedy, gdy mijają
Prowadzenie małych silników za pomocą TB6612FNG: 8 kroków

Napędzanie małych silników za pomocą TB6612FNG: TB6612FNG to układ scalony sterownika podwójnego silnika firmy Toshiba. Istnieje wiele tablic zaciskowych i jest to jeden z najpopularniejszych wyborów do napędzania małych silników. Istnieje wiele zasobów online, jak zacząć korzystać z TB6612FNG b
Prowadzenie silnika krokowego bez mikrokontrolera: 7 kroków

Prowadzenie silnika krokowego bez mikrokontrolera.: W tej instrukcji będę jeździł silnikiem krokowym 28-BYJ-48 z płytą tablicy darlington UNL2003, czasami nazywaną x113647, bez mikrokontrolera. Będzie miał start/stop, do przodu/ do tyłu i kontrola prędkości. Silnik jest jednobiegunowym silnikiem krokowym z
Tworzenie dysku startowego w systemie Linux (Ubuntu): 3 kroki
: 3 kroki")
Tworzenie dysku startowego z Linuksem (Ubuntu): Chcesz uruchomić Linuksa z pendrive'a, aby zainstalować go na swoim komputerze lub zrobić inne fajne rzeczy z Linuksem? - Zaraz dowiesz się, jak skonfigurować jeden, aby można było z niego pomyślnie uruchomić
NODEMCU LUA ESP8266 Prowadzenie układu scalonego sterownika wyświetlacza LED M5450B7: 5 kroków (ze zdjęciami)
")
NODEMCU LUA ESP8266 Sterowanie IC sterownika wyświetlacza LED M5450B7: M5450B7 to 40-pinowy układ sterownika wyświetlacza LED DIP. Wygląda raczej jak bestia, ale jest stosunkowo łatwy do kontrolowania i programowania. Są 34 piny wyjściowe, do których można podłączyć diodę LED do każdego. Urządzenie raczej pobiera prąd niż go dostarcza, więc c